|
|
 |
|
|
 |
Ученые Пермского Политеха смоделировали робота для обработки и перемещения валов на предприятиях
Исследование опубликовано в журнале «Проблемы машиностроения и автоматизации», №4 за 2023 год. Разработка проведена в рамках программы стратегического академического лидерства «Приоритет 2030».
Автоматизация технологических процессов на предприятиях стала неотъемлемой частью работы во многих отраслях промышленности. В этом помогают роботы. Один из ключевых аспектов роботизации – создание производственного манипулятора. Это сложное устройство, которое предназначено для подъема, перемещения, сортировки и сборки предметов. Внедрение таких манипуляторов позволит ускорить производство и повысить его качество. Важный этап создания подобных устройств – моделирование. Ученые ПНИПУ разработали модель манипулятора для повышения цеховой производительности за счет автоматизации процесса обработки и перемещения больших валов.
Вал – это деталь машины, предназначенная для передачи крутящего момента и восприятия действующих сил от расположенных на нем опор. Такие детали широко применяются в различных отраслях – в горнодобывающей промышленности, на производстве бумаги, пленки, металлической упаковки, текстиля, в полиграфии и других. Некоторые валы достигают массы до тонны, из-за которой их становится невозможно передвигать вручную. Многоэтапный технологический процесс хранения, обработки и перемещения таких валов по участку цеха отличается сложностью операций и трудоемкостью. Автоматизация с помощью робота-манипулятора значительно упрощает выполнение этих действий.
Одно из основных преимуществ моделирования производственного манипулятора – это возможность проводить тестирование и отладку его работы, не запуская реальное оборудование. Такой подход снижает риски и расходы, связанные с проведением реальных испытаний, позволяет определить проблемы и найти их решения еще до начала работы манипулятора в производстве. С помощью компьютерных моделей можно проанализировать, как различные факторы, например, длина и угол робота, скорость выполнения операции, влияют на производительность. Гибкость и точность этих систем позволяют снизить вероятность брака и повысить качество и скорость создания выпускаемой продукции. Кроме того, такой подход помогает улучшить безопасность работы операторов, а также экономит время и усилия.
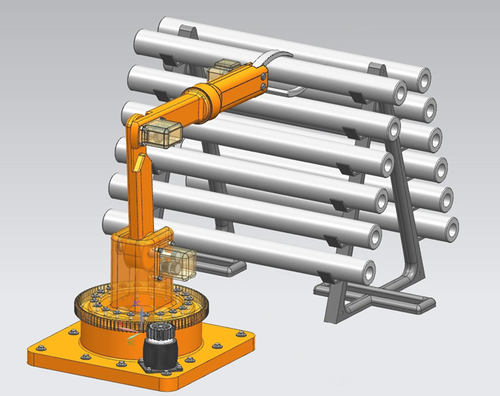
Ученые Пермского Политеха разработали модель робота-манипулятора, который позволит автоматизировать процессы работы с крупногабаритными валами.
– Манипулятор отличается от аналогичных моделей простотой изготовления основных узлов и обслуживания, надежностью механизмов, мобильностью, точностью движений. Его уникальность заключается в возможности точной настройки движений и высокой производительности, – говорит магистрант ПНИПУ, инженер-конструктор Дмитрий Каменских.
Конструкция устроена так. У производственного манипулятора есть «база» и три «плеча». «База» сопрягается с основанием путем центрирования внутренних пазов и перекатывания по направляющим с помощью подшипников. «Плечо» соединяется с ней при помощи валов. Каждое последующее «плечо» по такому же принципу соединяется с предыдущим. Второе и третье из них вращаются при помощи электродвигателя. У конструкции есть две лапы захвата, раскрытие и смыкание которых обеспечивается двумя валами-шестернями.
– Моделирование производственного робота играет важную роль в автоматизации технологического процесса обработки крупных валов. С помощью модели мы изучили и оптимизировали работу манипулятора, что при создании оборудования позволит достичь наилучших результатов. Модель имеет массу почти 2000 кг, при этом может перемещать валы массой до тонны, – объясняет доцент кафедры экономики и управления промышленным производством ПНИПУ Светлана Пономарева.
Ученые Пермского Политеха показали, что моделирование производственного манипулятора предоставляет ценные инструменты для улучшения эффективности и производительности промышленных процессов. В перспективе политехники планируют модернизировать предложенную модель посредством рельсового соединения, чтобы обеспечить ее перемещение по цеху от станка к станку. Сейчас ученые готовят документы на регистрацию патента по разработке.
Контактное лицо: Дарья Биянова (написать письмо автору)
Компания: ПНИПУ (все новости этой организации)
Добавлен: 00:38, 22.05.2024
Количество просмотров: 1086
Страна: Россия
| Ученый Пермского Политеха рассказал про комету C/2025 R3⁠⁠, ПНИПУ, 22:00, 28.04.2026, Россия |
489 |
| 19 апреля комета C/2025 R3 прошла перигелий, а уже 26 числа максимально приблизится к Земле. Считается, что она прибыла из Облака Оорта – гигантского «ледяного хранилища» из окраин Солнечной системы. Ученый ПНИПУ рассказывает, в чем ее отличие от других астрономических тел, «разомкнута» ли ее орбита и что ждет ее. |
|
| Микробиом кишечника влияет на мозг и психику: ученая Пермского Политеха объяснила, как это работает, ПНИПУ, 21:46, 28.04.2026, Россия |
35 |
| 23 апреля — День заботы о микробиоте. Бактерии влияют на обмен, настроение, психику. Ученая ПНИПУ рассказала, как работает блуждающий нерв, правда ли, что серотонин и дофамин вырабатываются в кишечнике, к каким болезням нервной системы ведет воспаление в ЖКТ, когда идти к врачу и какие привычки внедрить для счастья. |
|
| Зеленые преступники: ученая Пермского Политеха назвала 8 растений, которые нельзя выращивать на участке, ПНИПУ, 21:38, 28.04.2026, Россия |
31 |
| С началом тепла дачники едут на участки, не подозревая, что среди сорняков и семян могут быть запрещённые виды: четыре инвазивных сорняка-агрессора и четыре психотропных растения, вызывающих зависимость. Учёная Пермского Политеха объясняет, почему они в чёрном списке, с чем их путают и как случайно не нарушить закон. |
|

|
|
|
|
|
|
Разделы //
Новости по странам //
Сегодня у нас публикуются //
|
|